湖州附近多分量力傳感器廠家
發布時間:2022-10-13 01:19:34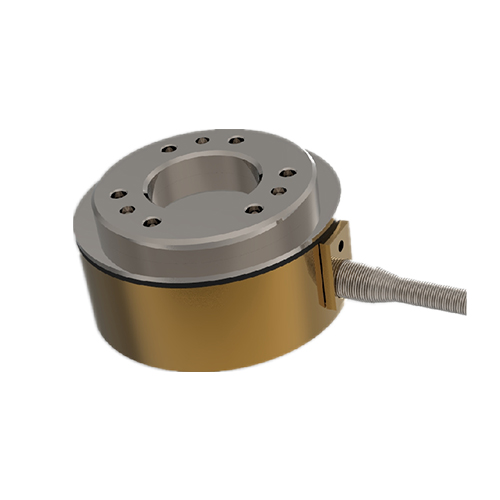
湖州附近多分量力傳感器廠家
作為標定裝置的核心部件—型加載梁:其設計精巧,簡單實用,確保力傳遞的連續型和準確性。其8個45°均布的安裝螺孔,使L型加載梁的安裝位置45°可調,從而使xF和yF載荷的施加可以實現,L型的外形設計,使該加載裝置不僅可以實現單唯力的施加,而且可以根據需要完成不同方向和大小的力矩和單唯力的同時施加,這種裝置從結構設計上滿足了六維力傳感器標定所需所用載荷狀態的實現;L型加載梁周身所布置的8個半球狀加載坑,以點一點接觸的方式確保了載荷施加方向的準確性。
湖州附近多分量力傳感器廠家
為了提高校準效率,德國達姆施塔特工業大學的Ewald等研制了全自動校準系統(一代)。多維力傳感器系統大大提高了校準的加載效率,但是該校準設備方案實現起來很復雜,由于采用了力發生器和力傳感器的組合來進行校準,加載的方向性、系統誤差等很大程度上取決于各種傳感器,因此從某種程度上增加了系統誤差。目前ETW采用了這種校準系統(二維力傳感器),在一代校準系統的基礎上進行了很多改進。上個世紀40年代,一些加載方法和載荷表就開始應用于多分量天平的校準過程。NASA蘭利研究中心Langley Research Center (LaRC)從1940年開始廣泛應用的是單元載荷表One Factor At The Time Table (OFAT),很多機構目前仍然還在使用這種加載方式。對于六自由度校準設備,OFAT方法從施加純凈的單分量載荷開始(253次實際加載卸載),然后再施加15組組合載荷(兩個分量的組合,481次實際加載卸載),可能大約需要6至8周時間。然而對于四自由度的校準設備很多組合載荷無法實現,加載點數被大大減少了。

湖州附近多分量力傳感器廠家
一般說來,機器人是沒有觸覺的,但是他們也可以“進化” 出觸覺并受益于觸覺。我們賦予機器人多維力覺傳感器,機器人便能夠擁有觸覺,并且在簡單的環境中操縱物體,同時不失更高的精度和靈敏度。大多數為協同應用而設計的機器人都具有內置的力和扭矩感應功能以確保安全,特別是在靠近或直接與人類一起工作時。 但是那遠遠不夠,因為我們人類喜歡將沉悶,重復,骯臟和危險的任務都交給那些機電一體化機器人來完成。所以,我們更關注那些能夠實現真正工作的獨立或集成的六多維力傳感器,只有把這些高端傳感器集成在機電一體化機器人上才能實現我們的目的。

湖州附近多分量力傳感器廠家
六維力傳感器使用前都需要校準。對于多維力傳感器,校準是一件復雜的工作,數據處理方法也是多種多樣的。力傳感器性能的好壞與校準設備及方法密切相關。校準一般采用砝碼進行,因為砝碼具備非常高的穩定性和精準度,依靠重力及垂直向下的方向性,這種簡單標準載荷的可靠性超過了很多施力裝置。也有利用力發生器及高精度力傳感器實現自動加載與測量的,然而實現起來相當困難,并且這樣的成套裝置仍然必須通過砝碼進行首次校準與調試。