蚌埠數(shù)據(jù)采集器價(jià)格
發(fā)布時(shí)間:2024-02-04 01:04:16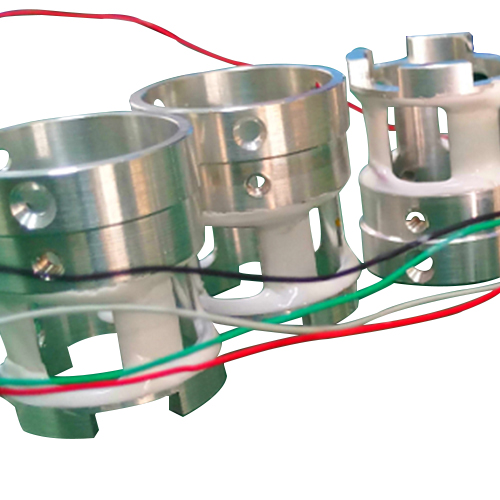
蚌埠數(shù)據(jù)采集器價(jià)格
安裝稱六分量力感器重要的問題就是要是合理的,能夠讓其在日后的工作當(dāng)中正常的使用。所以進(jìn)行合理的安裝是非常關(guān)鍵的。那么在安裝六維力傳感器的過程當(dāng)中需要注意什么問題。假如使用的是六維力傳感器,在安裝底座的時(shí)候一定要使用水平儀進(jìn)行調(diào)整,達(dá)到水平狀態(tài)才能安裝。如果是安裝多個(gè)傳感器一起進(jìn)行測量 ,那么就要讓多維傳感器的底部盡可能保持在一個(gè)水平面上。 這樣的發(fā)就可以確保任何一個(gè)傳感器所承受的力差不多是一樣的。與此同時(shí),在加載裝置的兩側(cè)還需要假裝銅編織線制作而成的旁路器。

蚌埠數(shù)據(jù)采集器價(jià)格
從檢測運(yùn)動(dòng)物體到傳輸帶上的零件定位,使機(jī)器人可以根據(jù)接收到的信息適當(dāng)調(diào)整自己的動(dòng)作;如果說視覺傳感器給了機(jī)器人眼睛,那么六維力傳感器則賦予機(jī)器人觸覺,利用力矩傳感器感知末端執(zhí)行器的力度;除了考慮機(jī)器人自身的正常運(yùn)作,為了保障作業(yè)人員的安全,機(jī)器人還應(yīng)安裝上安全傳感器,當(dāng)機(jī)器人感知到異常的力度時(shí),觸發(fā)緊急停止,從而確保作業(yè)人員的安全。

蚌埠數(shù)據(jù)采集器價(jià)格
六分量力傳感器一般分成固定端(機(jī)器人端)和加載端(工具端)。兩端相對(duì)受力時(shí),傳感器發(fā)生彈性變形,傳感器內(nèi)部的應(yīng)變計(jì)電阻發(fā)生變化,進(jìn)而轉(zhuǎn)換成電壓信號(hào)輸出。六維力傳感器要根據(jù)具體的應(yīng)用場合考慮,精度和分辨率決不能等同看待。分辨率是指傳感器能分辨的較小信號(hào),精度是指傳感器測量值與標(biāo)稱值的較小差異。六維力傳感器的精度一般在0.5%F.S以內(nèi),M38系列六軸力傳感器精度高達(dá)0.2%F.S,分辨率約為滿量程的1/5000,能夠滿足各種應(yīng)用需求。六維力傳感器是一種特殊的力傳感器,能夠同時(shí)測量中性坐標(biāo)系(OXYZ)內(nèi)的三個(gè)力(FX、FY、FZ)和三個(gè)矩(MX、MY、MZ)。六維力傳感器一類技術(shù)含量相當(dāng)高的產(chǎn)品,在機(jī)器人、國防、汽車等領(lǐng)域都有重要應(yīng)用。

蚌埠數(shù)據(jù)采集器價(jià)格
六維力傳感器主要作用于空間三個(gè)方向的力,除了要解決對(duì)所測力分量敏感的單調(diào)性和一致性問題外,還要解決因結(jié)構(gòu)加工和工藝誤差引起的維間(軸間)干擾問題、動(dòng)靜態(tài)標(biāo)定問題以及矢量運(yùn)算中的解耦算法和電路實(shí)現(xiàn)等,可以說,六維力傳感器是單維力傳感器的升級(jí)版本。六分量傳感器,也稱“六軸力傳感器”,是多維力傳感器中的一種,實(shí)際上就是一種能夠同時(shí)檢測3個(gè)力分量和3個(gè)力矩分量的力傳感器。作為一個(gè)仍在發(fā)展的研究對(duì)象,多維力傳感器在機(jī)器人,特別是研制高性能多維力傳感器和運(yùn)用多維力傳感器中還存在很多問題,也是研究新型多維力傳感器的難點(diǎn)問題。六維力傳感器的優(yōu)勢首先是可以力覺拖動(dòng)示教,降低示教工作量,其次可以保證對(duì)打磨面的法向打磨,可以實(shí)現(xiàn)對(duì)復(fù)雜未知曲面的跟蹤打磨。

蚌埠數(shù)據(jù)采集器價(jià)格
環(huán)境感知和行為決策是近些年隨著智能化的升級(jí)衍生出來的新機(jī)會(huì),運(yùn)動(dòng)控制偏主機(jī)的內(nèi)部控制,相對(duì)比較成熟,但也有為適應(yīng)智能化的方向衍生出的新的技術(shù)需求。執(zhí)行環(huán)節(jié)之前的設(shè)備已經(jīng)做的不錯(cuò),感知和決策環(huán)節(jié)隨著技術(shù)進(jìn)步,機(jī)會(huì)越來越多。其中環(huán)境感知主要是通過各種傳感器獲取環(huán)境實(shí)時(shí)數(shù)據(jù),并對(duì)數(shù)據(jù)進(jìn)行初步分析判斷,比如無人駕駛的各種感知傳感器,智能識(shí)別攝像頭、毫米波雷達(dá)、激光雷達(dá)、超聲波傳感器等,機(jī)器人場景的多維力傳感器、六維力傳感器、振動(dòng)傳感器、工業(yè)攝像頭等。有關(guān)智能制造的分類方法和解讀體系很多,總體看一般從技術(shù)邏輯上,將智能制造或者說智能化的工業(yè)場景分為三大環(huán)節(jié):環(huán)境感知、行為決策、運(yùn)動(dòng)執(zhí)行控制。
蚌埠數(shù)據(jù)采集器價(jià)格
六分量力傳感器傳感器品牌誤區(qū):很多時(shí)候大家都認(rèn)為國產(chǎn)的產(chǎn)品是不好用,甚至是不能用。追求廉價(jià):物美價(jià)廉這是每個(gè)人希望看到的;但事實(shí)上,高品質(zhì)的產(chǎn)品就決定了它的價(jià)格會(huì)相對(duì)的高一些。精度誤區(qū):大家在選擇產(chǎn)品的時(shí)候,總以為精度很重要的;其實(shí)從某個(gè)角度來說:穩(wěn)定性比產(chǎn)品的精度更重要,精度選擇應(yīng)該是建立在高穩(wěn)定性的基礎(chǔ)上的。選擇合適的量程、合適的精度、合適安裝方式、合適的輸出方式。