揚(yáng)州周邊多分量力傳感器多少錢
發(fā)布時(shí)間:2023-03-08 01:17:27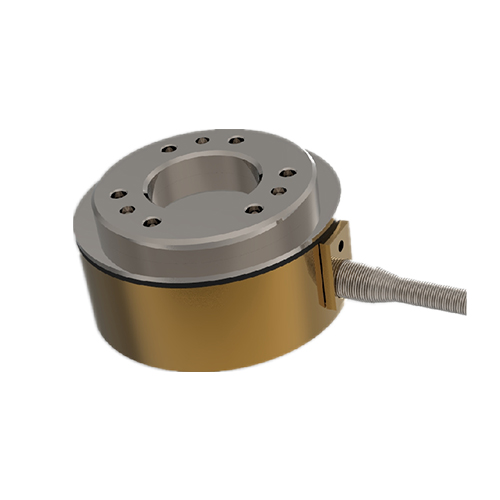
揚(yáng)州周邊多分量力傳感器多少錢
六分量力傳感器傳感器品牌誤區(qū):很多時(shí)候大家都認(rèn)為國(guó)產(chǎn)的產(chǎn)品是不好用,甚至是不能用。追求廉價(jià):物美價(jià)廉這是每個(gè)人希望看到的;但事實(shí)上,高品質(zhì)的產(chǎn)品就決定了它的價(jià)格會(huì)相對(duì)的高一些。精度誤區(qū):大家在選擇產(chǎn)品的時(shí)候,總以為精度很重要的;其實(shí)從某個(gè)角度來說:穩(wěn)定性比產(chǎn)品的精度更重要,精度選擇應(yīng)該是建立在高穩(wěn)定性的基礎(chǔ)上的。選擇合適的量程、合適的精度、合適安裝方式、合適的輸出方式。

揚(yáng)州周邊多分量力傳感器多少錢
數(shù)據(jù)采集部分采用了SRI 96通道數(shù)據(jù)采集系統(tǒng),同時(shí)采集14顆牙齒的三維受力情況(FX、FY、FZ、MX、MY、MZ)。這些數(shù)據(jù)用于研究矯治器形態(tài)、移動(dòng)量和移動(dòng)意圖是否準(zhǔn)確表達(dá),用于研究矯治器和牙齒之間受力大小是否合理,同時(shí)這些數(shù)據(jù)也作為有限元力學(xué)計(jì)算的基礎(chǔ)。目前,該系列產(chǎn)品已在數(shù)家知名牙科整形企業(yè)得到應(yīng)用。用于牙齒正畸領(lǐng)域的超薄型六分量力傳感器。該傳感器量程為80N、1.2Nm,精度1%F.S,過載能力300%F.S。M4312B厚度僅8mm,出線位置位于傳感器底部,便于假牙模型緊密排列。正畸就是矯正牙齒、解除錯(cuò)牙合畸形。正畸主要研究錯(cuò)牙合畸形的病因機(jī)制,診斷分析及其預(yù)防和治療,正畸可以達(dá)到美觀牙齒的功效。畸形的矯治主要依靠在口腔內(nèi)部或外部戴用矯治器,對(duì)牙齒、牙槽骨及頜骨施加適當(dāng)?shù)摹吧锪Α保蛊洚a(chǎn)生生理性移動(dòng),從而矯治畸形。

揚(yáng)州周邊多分量力傳感器多少錢
多維力傳感器與六分量力傳感器相比,除了要解決對(duì)所測(cè)力分量敏感的單調(diào)性和一致性問題外,還要解決因結(jié)構(gòu)加工和工藝誤差引起的維間(軸間)干擾問題、動(dòng)靜態(tài)標(biāo)定問題以及矢量運(yùn)算中的解耦算法和電路實(shí)現(xiàn)等。多維力傳感器是一種能夠同時(shí)測(cè)量?jī)蓚€(gè)方向以上力及力矩分量的力傳感器,多維力完整的形式是六維力/力矩傳感器,即能夠同時(shí)測(cè)量三個(gè)力分量和三個(gè)力矩分量的傳感器,目前廣泛使用的多維力傳感器就是這種傳感器。在笛卡爾坐標(biāo)系中力和力矩可以各自分解為三個(gè)分量。

揚(yáng)州周邊多分量力傳感器多少錢
在蒸汽流量測(cè)量中,蒸汽主要涉及兩種,一種為外供蒸汽,一種為鍋爐的過熱蒸汽。外供蒸汽是經(jīng)過減溫減壓后的蒸汽,溫度不高,且摻有大量水分,且需時(shí)用時(shí)不用,時(shí)刻根據(jù)用戶的要求改變蒸汽流量。在實(shí)際的流量測(cè)量過程中有時(shí)流量偏大有時(shí)流量偏小,非常不穩(wěn)定,經(jīng)常需要進(jìn)行排污,每次排污后變送器的測(cè)量又準(zhǔn)確了,但蒸汽管道的排污次數(shù)多了,又容易導(dǎo)致導(dǎo)壓管上各個(gè)接點(diǎn)漏汽。在測(cè)量過熱蒸汽的使用中,發(fā)現(xiàn)的問題就是有時(shí)停機(jī),重新開機(jī)后流量就會(huì)發(fā)生偏差,導(dǎo)致失準(zhǔn),且有時(shí)停下來后仍有少許流量顯示。一般變送器安裝位置低于測(cè)量管道。但在實(shí)際的安裝中,外供蒸汽流量的凝結(jié)罐與變送器都高于測(cè)量管道,且從節(jié)流裝置接出來的向下敷設(shè)至少1米的導(dǎo)壓管路也太短。

揚(yáng)州周邊多分量力傳感器多少錢
怎么才能更快一點(diǎn)?業(yè)內(nèi)嘗試著將數(shù)據(jù)中心“預(yù)處理”的部分前移到傳感器端。“我們進(jìn)行了智多維力傳感器的嘗試,”升哲科技高級(jí)工程師劉正中說,“原來傳感器具備收集信號(hào)的單一功能,但是信號(hào)需要在傳感器端和處理終端來回傳遞,這些需要時(shí)間也需要能源,如果六維力傳感器能提前過濾掉一些不必要的信息,過程會(huì)精簡(jiǎn)不少。”人類獲取信息,80%是通過眼睛;在人工智能捕獲信息的過程中,視覺傳感器也占據(jù)著相當(dāng)重要的地位——目前主要有雷達(dá)、視頻兩種方式。視頻相較于雷達(dá)來說,是整體展現(xiàn),呈現(xiàn)情況不易受干擾,而雷達(dá)對(duì)周圍環(huán)境進(jìn)行3D建模,會(huì)比一般的照相攝像頭能包含更多深度信息。通暢是基礎(chǔ),判斷是關(guān)鍵。“汽車的速度要求無人判斷和操作在毫秒之間,因此計(jì)算兩車之間、車路之間、車人之間的碰撞可能性必須要快。”畢超說,信息的獲取、傳遞、計(jì)算、反饋等過程,需要一氣呵成。